³£ÓĆµÄ¹¤ŅµÄŚæś¾µČżÖÖ²ī“ķæŲÖĘ·½Ź½ŹĒĒ°Ļņ¾Ą“ķ£ØFEC£©”¢¼ģ“ķÖŲ·¢£ØARQ£©ŗĶ»ģŗĻ¾Ą“ķ£ØHEC£©”£
1 Ē°Ļņ¾Ą“ķ(FEC)
ĻņĒ°”ś¾Ą“ķŹĒ·¢ŠÅ¶Ė½«ŠÅĻ¢Āė¾ŠÅµĄ±ąĀėŗó±ä³ÉÄܹ»¾ĄÕż“ķĪóµÄĀė£¬Č»ŗóĶعżŠÅµĄ·¢ĖĶ³öČ„£»ŹÕŠÅ¶ĖŹÕµ½ÕāŠ©Āė”ų×éŗó£¬øł¾ŻÓė·¢ŠÅ¶ĖŌ¼¶ØŗƵıąĀė¹ęŌņ£¬¹¤ŅµÄŚæś¾µĶعżŅėĀėÄÜ×Ō¶Æ·¢ĻÖ²¢¾ĄÕżŅņĶØŠÅ“ųĄ“µÄŹż¾Ż“ķĪó”£Ē°Ļņ¾Ą“ķ·½Ź½£ĄÖ»ŅŖĒóµ„ĻņŠÅµĄ£¬Ņņ“ĖĢŲ±šŹŹŗĻÓŚÖ»ÄÜĢį¹©µ„ĻņŠÅµĄµÄ³”ŗĻ”£
2 ¼ģ“ķÖŲ·¢£ØARQ£©
¼ģ“ķ”ÓÖŲ·¢ĻµĶ³µÄ·¢ŠÅ¶Ė½«ŠÅĻ¢Āė±ą³ÉÄܹ»¼ģ“ķµÄĀė×é·¢ĖĶµ½ŠÅµĄ£¬ŹÕŠÅ¶ĖŹÕµ½Ņ»øöĀė×éŗó½ųŠŠ¼ģŃ飬½«”ž¼ģŃé½į¹ū£ØÓŠĪóĀė»ņÕßĪŽĪóĀė£©Ķعż·“ĻņŠÅµĄ·“Ą”øų ·¢ŠÅ¶Ė×÷ĪŖ¶Ō·¢ŠÅ¶ĖµÄŅ»øöÓ¦“šŠÅŗÅ”£·¢ŠÅ¶Ėøł¾ŻŹÕµ½µÄÓ¦“šŠÅŗÅ×ö³öŹĒ¼ĢŠų·¢ ĖĶŠĀµÄŹż¾Ż»¹©ŹĒ°Ń³ö“ķµÄŹż¾ŻÖŲ·¢µÄÅŠ¶Ļ”£
3 »ģŗĻ¾Ą“ķ£ØHEC£©
»ģŗĻ¾Ą“ķŹĒ”»Ē°Ļņ¾Ą“ķ·½Ź½ŗĶ¼ģ“ķÖŲ·¢·½Ź½µÄ½įŗĻ£¬ŌŚŹµŹ±ŠŌŗĶŅėĀėø“ŌÓŠŌ·½ĆęŹĒĒ°Ļņ¾Ą“ķŗĶ¼ģ“ķÖŲ·¢·½Ź½µÄÕŪÖŌ”£
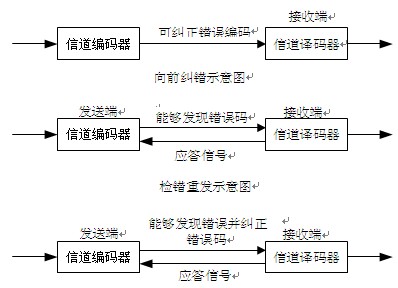
Ķ¼ ČżÖÖ·½Ź½¹¹³ÉµÄ²ī“ķæŲÖĘ·½Ź½Ź¾ŅāĶ¼
ÓÉÓŚÄŚæś¾µŠÅµĄµÄø“ŌÓ”āŠŌ£¬ŅŖ¾«Č·µŲ¼ĘĖćø÷ÖÖ²ī“ķµÄĶ³¼ĘĢŲŠŌ¼ČĄ§ÄŃÓÖ²»×¼Č·£¬Ņ»°ćŅŌŹżĮ漶¹Ą¼Ęø÷ÖÖĶØŠÅµÄ”ĘŠÅµĄŠŌÄÜ£¬²ī“ķæŲÖĘĻµĶ³µÄ“«ŠÅĀŹÓė“ķ×éĀŹµÄŅŖĒó³É ·“±Č£¬ČōŅėĀė”ÓŗóµÄ×é“ķĀŹŅŖĒóŌ½µĶ£¬ŌņČßÓąĀėŌŖŌ½¶ą£¬Ó¦øĆ”ŌŃ”ŌńĻąÓ¦µÄĀė³¤£¬Āė×éÄŚ”ž³ö“ķ»ś»įŌö¼Ó£¬·“Ą”“ĪŹżĻąÓ¦Ōö¼Ó£¬“«ŠÅĻ¢ĀŹ½µØµĶ”£Źµ¼ŹÓ¦ÓĆÖŠ£¬ŠčŅŖøł¾Ż ŠÅµĄĪóĀėĀŹŅŖĒóŗĶ±£Ö¤“«ŠÅĀŹµÄŅŖĒóĄ“Ń”ŌńĀė³¤”£
¶ŌÓŚ¹¤ŅµÄŚæś¾µ¶ųŃŌ£¬Ņ»°ćĘäĶ؊žąĄėĪŖ 100 Ć××óÓŅ£¬Õ¾ÓĆ£Ą µÄ¶Ģ²ØŠÅµĄ¾ąĄė¶Ī£¬Źż¾Ż·¢Éś“ķĪóøÅĀŹ¾ßÓŠĖ껜ŠŌ£¬ŹŹŅĖ²ÉÓĆ¾ßÓŠĻņĒ°¾Ą“ķ(FEC)ÄÜĮ¦µÄ HEC²ī“ķæŲÖĘ·½Ź½”£Golay(23,12)ŗĶ Golay(24,12)×÷ĪŖ±Č½Ļ³ÉŹģµÄ BCH,¾ßÓŠ¾Ą“ķÄÜØKĮ¦Ē棬ŅėĀė ÄÜĮ¦ĒæŗĶŅėĀėČŻŅ׏µĻÖµÄĢŲµć£¬Ó¦ÓĆÓŚ¶ŌæÉææŠŌŗĶŹµŹ±ŠŌ±Č½ĻŃĻøńµÄ»śĘ÷ČĖĄ“Ėµ ŹĒŗÜŹŹŅĖµÄ”£
